EmplifAI、MG400×LeRobotで協働ロボ自律化へ
ベストカレンダー編集部
2025年12月1日 06:00
MG400 LeRobot開発開始
開催日:11月30日
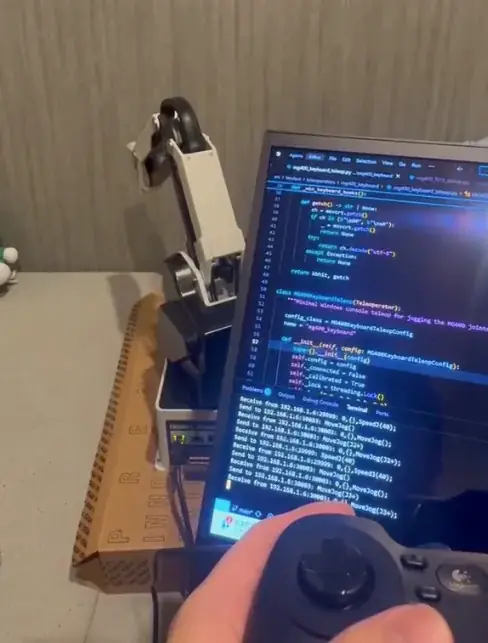
協働ロボットMG400にLeRobotを組み合わせて「現場の思考」を目指す取り組み
株式会社EmplifAIは、DOBOT社製の協働ロボットアームMG400を対象に、オープンソースロボティクス基盤LeRobotを活用した制御・学習スタック(以下「MG400 LeRobotスタック」)の開発を開始しました。プレスリリースは発行日を2025年11月30日 23時51分としています。
本プロジェクトは、DOBOT製品の国内正規代理店である株式会社アフレルからの貸出により実機を用いて実施されています。EmplifAIは、模倣学習と強化学習を組み合わせることで、MG400が現場の作業者と同じように考え、作業を遂行できるフィジカルAIプラットフォームとして活用できることを目標に開発を進めます。開発の進捗や動作確認については公開されている動作動画も参照可能です。
動作確認の映像リンク:
- https://x.com/OsoneHiroyuki/status/1983887256936202670?s=20
- https://x.com/OsoneHiroyuki/status/1982661114577215642?s=20
現場課題とマルチメーカー対応の必要性
製造・物流・研究開発の現場では人手不足やスキル継承の課題が顕在化しています。特に「プログラムを書ける人だけがロボットを動かせる」という状況からの脱却が求められており、操作の直感化やデータ駆動による自律化が重要になっています。
一方で協働ロボットは世界的に普及しているものの、メーカーごとにソフトウェアスタックが分断されているため、AIや模倣学習との連携が難しいという問題があります。EmplifAIはヒューマノイドや協働ロボット向けのフィジカルAI開発支援を行う中で、どのメーカーのロボットでも同様のワークフローでデータ収集から学習・デプロイまでを扱える「マルチメーカー対応のロボット学習スタック」の必要性を強く認識しました。
そのため、まずはコンパクトで取り回しの良いDOBOT MG400を対象に、オープンソースのLeRobotと組み合わせた開発基盤の構築を第一歩として位置づけています。
MG400 LeRobotスタックが備える主要機能と技術要素
本プロジェクトにおける開発スタックは、データ収集から学習、実機へのデプロイまでをカバーする複数の機能群で構成されます。目的は、テレオペレーションによって得られた実際の作業データを用い、模倣学習や強化学習でポリシーを学習し、MG400上で自律動作を実現することです。
以下に、現在明示されている主要な機能群とその詳細を示します。これらはLeRobot互換形式を中心に設計され、将来的に他社アームやヒューマノイドへ横展開できるアーキテクチャを念頭に置いています。
- テレオペレーションによるデータ収集パイプライン
オペレータがMG400を直感的に操作し、その軌跡、関節角度、カメラ画像などを自動でログ化する仕組みを整備します。ログは後段の学習プロセスに利用できる形式へ変換されます。
- 模倣学習・強化学習によるポリシー学習
収集したデータをLeRobot互換形式に変換し、物体把持、整列、簡易組立といったタスクの自律動作ポリシーを学習します。模倣学習により人の操作パターンを移植し、強化学習で環境に適応した最適化を図ります。
- 学習済みモデルのMG400実機へのデプロイ
学習済みポリシーをMG400の制御インターフェースに橋渡しするインフラを整備し、実機上での動作検証・チューニングを行います。これにより学習結果の現場適用性を確認します。
- マルチメーカー展開を見据えたアーキテクチャ設計
今回のMG400対応をベースとして、将来的に他社アームやヒューマノイドにも横展開できるよう、データ形式やAPI設計を共通化します。現場目線でのフィジカルAI活用を実現するための基盤を目指します。
技術的な実装ポイント
テレオペレーションで収集するデータは、軌跡情報、関節角度、フォースセンシング(利用する場合)、カメラ画像など多岐にわたります。これらをLeRobot互換のデータ形式に整形して学習用データセットを作成します。
学習済みモデルを実機にデプロイする際には、MG400の制御APIとLeRobot側の抽象化層を橋渡しするソフトウェアコンポーネントが必要になります。この橋渡し部分では、リアルタイム性、セーフティ制約、物理挙動の差分を考慮した補正処理が重要になります。
- ログ化される主なデータ項目
- 軌跡(位置・姿勢)、各関節角度、カメラ画像(RGB/場合によっては深度)、操作時のメタデータ(タイムスタンプ・オペレータIDなど)
- 対象とする初期タスク例
- 物体把持、整列、簡易組立、ピック&プレース
- 設計上の配慮
- APIの共通化、データ形式の標準化、実機上での安全制御の整備
実施体制、企業情報、問合せ窓口
本プロジェクトはEmplifAIが主体となり、DOBOT製品の国内正規代理店である株式会社アフレルから貸与されたMG400を用いて進められています。実機を用いたデモや展示会での公開も視野に入れて段階的に開発を進行させる計画です。
下記に株式会社EmplifAIの基本情報および本件に関する連絡先を整理します。事業内容としてはフィジカルAI・ロボティクス開発支援、AI制御アルゴリズム開発、ロボット導入・PoC支援、ヒューマノイドロボットレンタル、イベント出展などが記載されています。
- 会社名
- 株式会社EmplifAI
- 所在地
- 〒101-0052 東京都千代田区神田小川町一丁目8番3号 小川町北ビル
- 代表者
- 代表取締役 大曽根 宏幸
- 事業内容
- フィジカルAI・ロボティクス開発支援、AI制御アルゴリズム開発、ロボット導入・PoC支援、ヒューマノイドロボットレンタル、イベント出展 ほか
- URL
- https://emplif.ai/
- お問い合わせ
- E-mail:support@emplif.ai
本リリースのカテゴリ情報としては「商品サービス」で、ビジネスカテゴリは「パソコン・周辺機器」「サーバ・周辺機器」として登録されています。また、関連するキーワードとして以下が挙げられています。
- フィジカルAI
- DOBOT
- mg400
- 模倣学習
- テレオペ(遠隔操作)
- LeRobot
- 協働ロボット
要点の整理とまとめ
以下の表は、本記事で触れたプロジェクトの主要情報を整理したものです。表中の項目はプロジェクトの目的、対象機材、主要機能、実施体制、連絡先などを含みます。
| 項目 | 内容 |
|---|---|
| プロジェクト名(概要) | DOBOT MG400向けのLeRobotを活用した制御・学習スタック(MG400 LeRobotスタック)の開発 |
| 発表者 | 株式会社EmplifAI |
| 発表日時 | 2025年11月30日 23時51分 |
| 対象ハード | DOBOT社製協働ロボットアーム MG400(株式会社アフレルより貸出) |
| 基盤ソフトウェア | LeRobot(オープンソースロボティクス基盤) |
| 主要機能 | テレオペによるデータ収集、模倣学習・強化学習によるポリシー学習、学習済みモデルの実機デプロイ、マルチメーカー対応を見据えたAPI/データ形式の共通化 |
| 初期想定タスク | 物体把持、整列、簡易組立、ピック&プレース |
| 連絡先 | support@emplif.ai |
| 公式URL | https://emplif.ai/ |
| 関連動画 | 動作動画1、動作動画2 |
| カテゴリ/キーワード | 商品サービス / パソコン・周辺機器、サーバ・周辺機器 / フィジカルAI、DOBOT、mg400、模倣学習、テレオペ、LeRobot、協働ロボット |
この記事は、EmplifAIによるMG400 LeRobotスタック開発開始の公表内容を整理して伝えるものであり、プロジェクトの目的、技術要素、実施体制、連絡先に関する情報を表と本文でまとめました。実機デモや展示の公開は今後の開発進捗に応じて行われる旨が明記されており、詳しい技術的仕様や成果は段階的に公開される見込みです。
